Screenshot: Unter Google nach „Gladys West gps“ gesucht und unter Bildern gefunden (Bildquelle [2])
Wir nutzen das GPS täglich, vor allem im Smartphone und auf unserem Navi im Auto. Aber wusstet Ihr eigentlich, wem wir das zu verdanken haben? Wer war die führende Wissenschaftlerin bei der Entwicklung des von uns allen quasi ununterbrochen genutzten GPS? Die amerikanische Mathematikerin Gladys Mae West [1]. Eine Würdigung ihrer herausragenden Leistungen findet Ihr bei Katharina Federl im TAZ-Beitrag „Als eine Frau die Form der Erde errechnete“ [2].
🔴 | Cada vez que utilizas el GPS estás usando el código matemático de la Dra. Gladys West, la mujer que mapeó el planeta.
Fue una brillante matemática estadounidense cuyo trabajo en el modelado preciso de la forma de la Tierra sentó las bases fundamentales para el desarrollo… pic.twitter.com/LEQ735RSCR
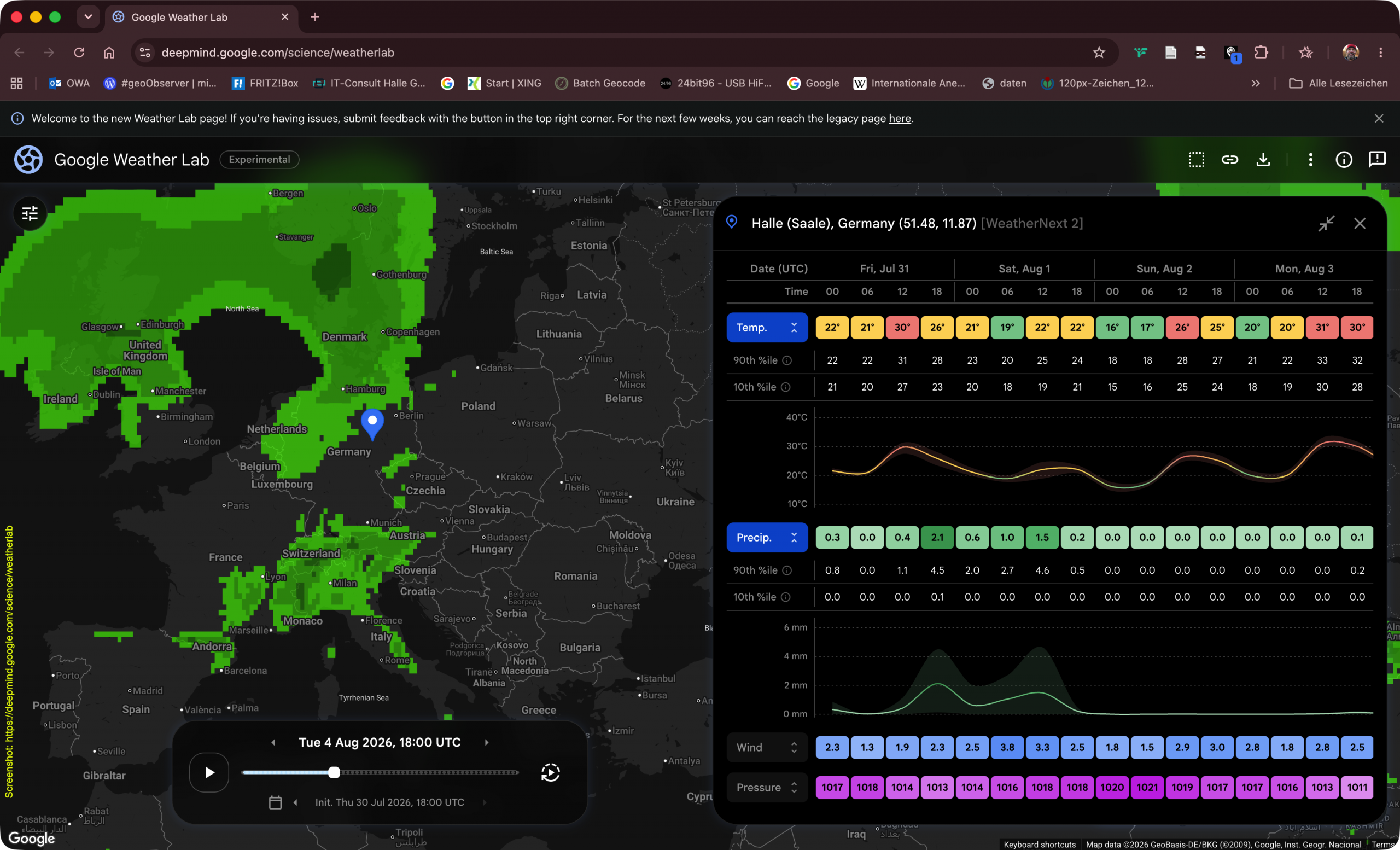
Screenshot: Links in der Karte – können wir am 4. August in Halle mit Regen rechnen? Rechts die Diagramme verschiedener Wetterparameter für Halle (Saale) (Bildquelle [2])
Peter Battaglia von DeepMind hat auf X (ehemals Twitter) angekündigt [1], dass die Google-Wettermodelle von DeepMind und Google Research in einer neuen Version [2] aktualisiert werden. Ich habe es mir mal angeschaut und bin begeistert. Weltweite Wettervorhersagen animiert für die nächsten 14 Tage (Default-Einstellung) und bei Klick auf den interessierenden Standort eine perfekte Ausgabe unterschiedlicher Wetterparameter wie Temperatur, Niederschlagsmenge und Windgeschwindigkeit. Einfach mal ausprobieren, vielleicht am kommenden Wochenende, es lohnt sich.
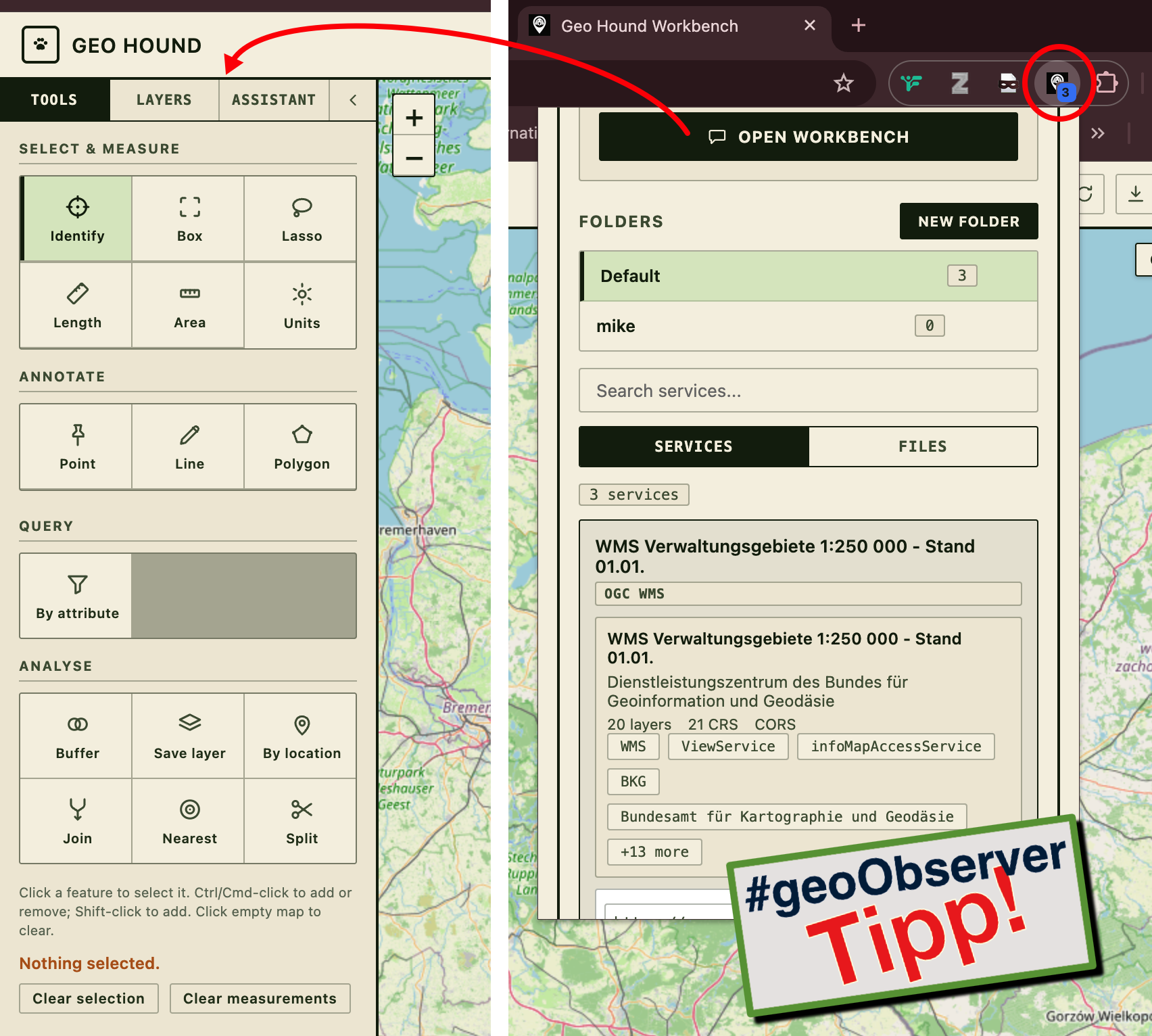
Screenshots: Links die Worknbench und rechts drei erkannte Geodienste, einer der WMS der Verwaltungsgebiete der BKG
Über die Chrome-Erweiterung „Geo Hound“ hatte ich bereits vor einem reichlichen Jahr berichtet [1]. Geo Hound von MapScaping hilft Euch dabei, bereits beim Surfen im Internet Kartendienste (wie WMS, WMTS und Esri-Dienste) zu erkennen, zu erfassen und zu speichern. Damit entfällt das lästige Suchen und manuelle Kopieren oder die Analyse der Netzwerktraffics, Die Geodienste werden automatisch erkannt und können mit sofort im eigenen GIS genutzt werden. Nun hat MapScaping die Version 2 von Geo Hound [2], [3] veröffentlicht. Neu sind die Workbench, Attributtabellen wie in einem Desktop-GIS, räumliche Analyse direkt im Browser, der Import eigener Geodaten sowie viele Exportmöglichkeiten, Zeichenwerkzeuge und der KI-Assistent.
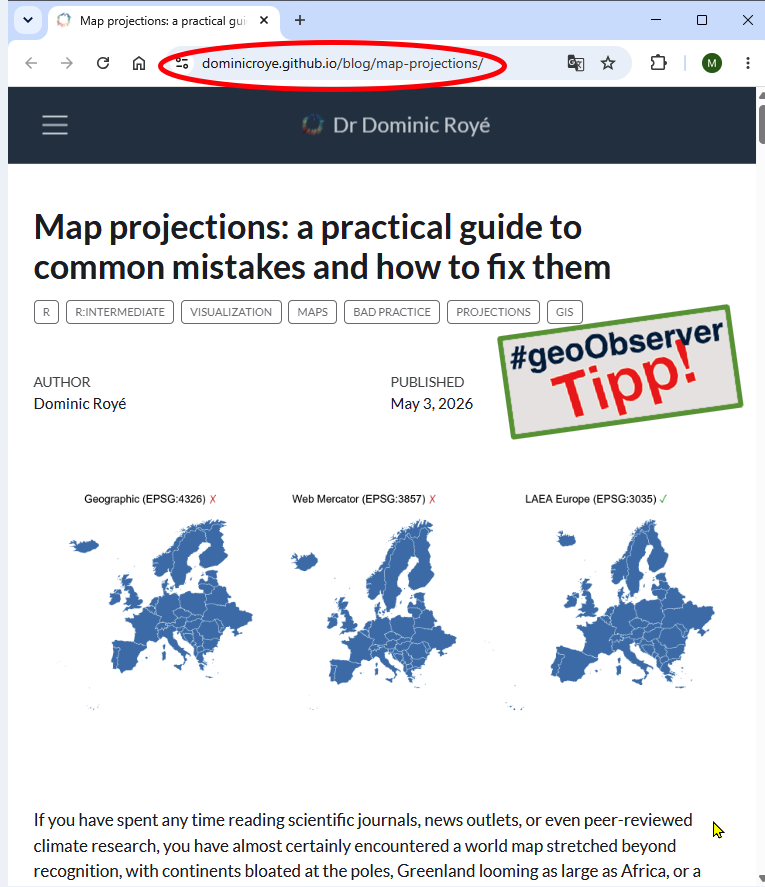
‚Jede Projektion ist ein Kompromiss, bei dem die Verzerrung einer Eigenschaft gegen die Genauigkeit einer anderen eingetauscht wird. Die entscheidende Frage lautet daher nicht „Welche Projektion ist die beste?“, sondern vielmehr „Welche Verzerrung ist für meinen konkreten Zweck akzeptabel?“‘ [1]
Egal, ob Flächen- oder Winkeltreue oder aber Abstände und Richtungspeilungen, es bleibt eine Annäherung. Dominic Royé erläutert in seinem Beitrag „Map projections: a practical guide to common mistakes and how to fix them“ [1], wie man sich der am besten geeigneten Kartenprojektion für einen bestimmten Zweck annähert und betrachtet häufige Fehler, die es zu vermeiden gilt.
Über den DBeaver als universelles Schaufenster in die unterschiedlichsten Datenbanken hatte ich hier bereits mehrfach [1] berichtet. Erst vor kurzem kam dann die Vorstellung der Kommandozeilen-Variante dbvr [2] dazu. Heute möchte ich Euch auf eine weitere Möglichkeit des DBeaver-Universums aufmerksam machen, die Webvariante CloudBeaver [3]. Gegenüber einer lokalen Desktop-Version hat die serverbasierte Web-Variante einige Vorteile:
Einsparung von lokalen Installationen und Updates auf jedem Clienten einzeln
zentrale Pflege der DB-Server-Verbindungen statt dezentraler Verwaltung auf jedem Client
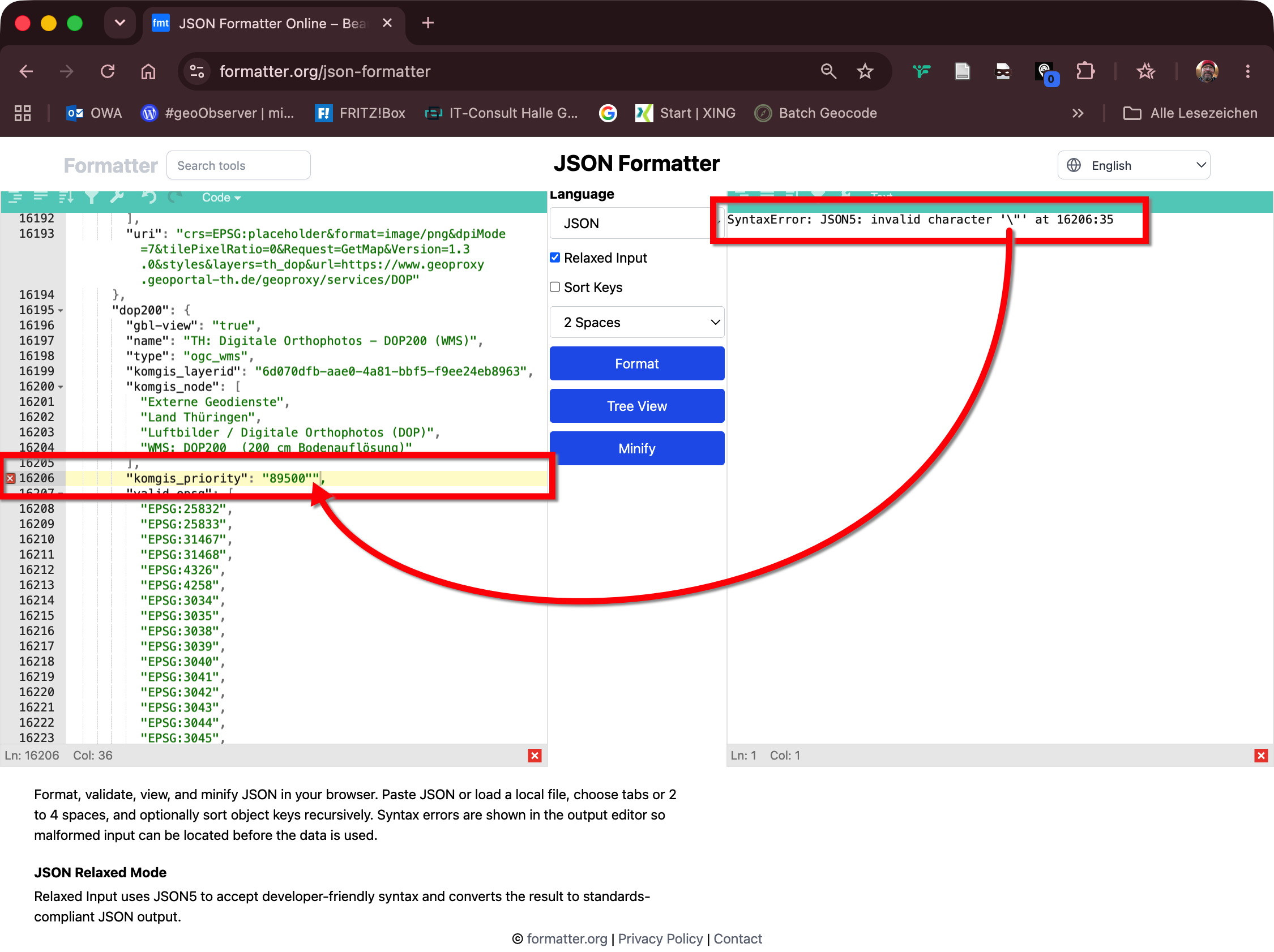
Screenshot 1: JSON-Fehler in Zeile 16206, nur ein “ zuviel, aber hättet Ihr es in endlicher Zeit gefunden? (Bildquelle [3])
Bei der QGIS-Plugin-Entwicklung mit Python und bei der Pflege der JSON-FIles für den GeoBasis_Loader (GBL) [1] entstehen bzw. ändern sich Python-Code und die Kataloge als JSON-Dateien. Die Anforderungen an den Python-Code sind im QGIS Plugin Repository [2] in letzter Zeit aus guten Gründen „verschärft“ worden. Die JSON-Dateien sind teilweise größer als 15000 Zeilen und werden von mir händisch gepflegt. Was also liegt näher, als sich bei der formalen Prüfung des Quelltextes und bei dessen Formatierung helfen zu lassen. Ich habe mit einigen Tools probiert, aber irgendwas fehlte mir immer. Nun bin ich auf formatter.org [3] alias „Code Beautifier“, gestoßen. Genau das, was ich gesucht habe. Es macht ganz genau, was es soll, es werden:
mein Python Code geprüft, Fehler visualisiert und der Code nach gängigen Regeln formatiert [4]
die JSON-Dateien auf Fehler geprüft und bei Bedarf neu formatiert [5]
Übrigens, auf der Policy-Seite [6] heißt es: „Clientseitige Verarbeitung: Die meisten unserer Tools verarbeiten Daten vollständig in Ihrem Browser mithilfe von JavaScript – Ihre Daten verlassen Ihr Gerät nie.“
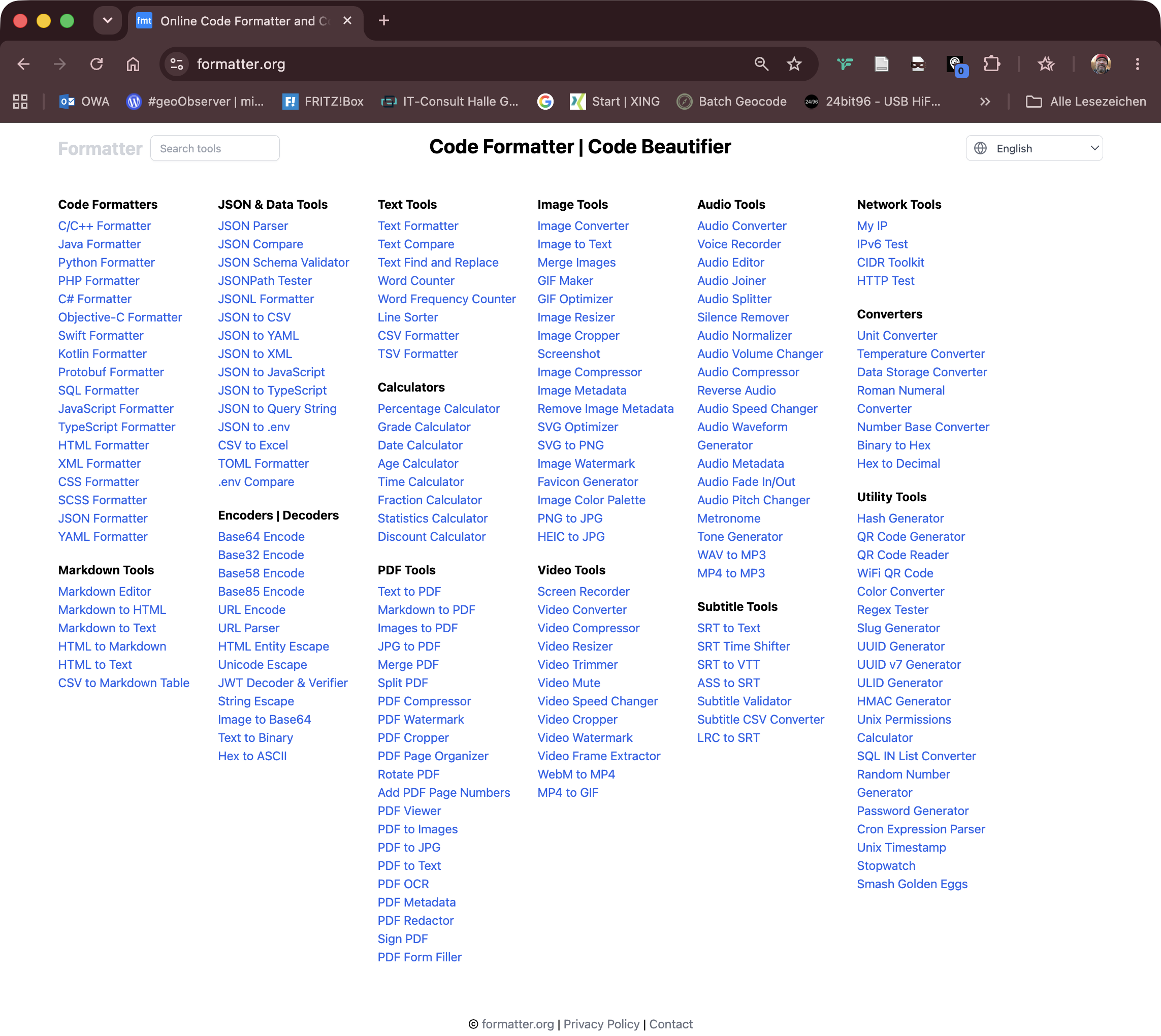
Um Euch eine Vorstellung davon zu geben, was auf formatter.org [3] noch alles möglich ist, scrollt Ihr am besten ganz nach unten und Ihr werdet eine wirklich umfangreiche Liste von 176 verfügbaren Werkzeugen sehen. Bei mir war tatsächlich Staunen angesagt! Und welche Tools nutzt Ihr so?
Screenshot 2: Liste der Tools auf formatter.org [3] (Bildquelle [3])
„Die vollständig überarbeitete und erweiterte 2. Auflage von „KI in Geodäsie und Geoinformatik“ bietet einen fundierten Überblick über aktuelle Verfahren, Konzepte und Anwendungsfelder der künstlichen Intelligenz im Kontext von Geodäsie und Geoinformatik. Ein interdisziplinäres Autorenteam aus 70 Expertinnen und Experten stellt bewährte und neu entwickelte Methoden vor und zeigt, wie KI die Erfassung, Verarbeitung und Analyse von Geodaten nachhaltig verändert.“ und „Dieses Werk bietet eine wissenschaftlich präzise und praxisnahe Gesamtdarstellung der aktuellen Entwicklungen der Geospatial AI und richtet sich gleichermaßen an Entscheider, Fachleute, Forschende und Studierende in Geodäsie, Geoinformatik, Geomarketing, Geowissenschaften und verwandten Disziplinen.“ [4]
Ich jedenfalls bin gespannt und kann es gar nicht erwarten, selbst ein Exemplar des Gemeinschaftswerkes von 70 ExpertInnen in den Händen zu halten. Bis dahin.
Am Mittwoch, den 22.07.2026 gab GDAL-Maintainer Even Rouault per Mail [1] bekannt, dass eine neue Version der universellen GDAL-Bibliothek [2] zur Verfügung steht, aktuell ist nun GDAL v3.13.2. GDAL steht für Geospatial Data Abstraction Library und ist vor allem als Kommandozeilen-Tool, aber auch als wesentlicher Bestandteil von QGIS bekannt. Alle Neuerungen findet Ihr auf GitHub [3].
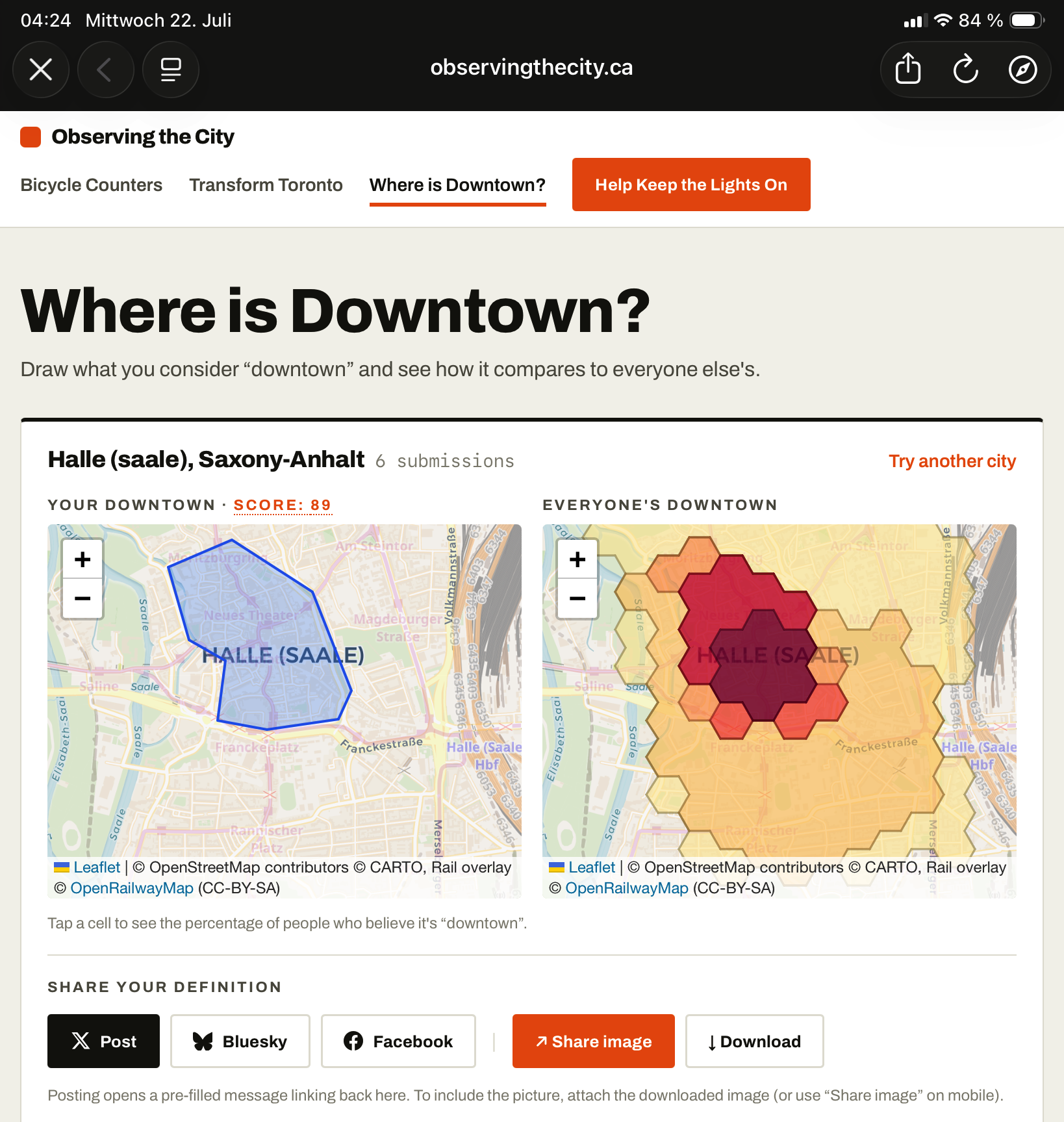
Laut Wikipedia [1] hat Downtown folgende Bedeutung: „Das Wort Downtown wird hauptsächlich in Nordamerika im Englischen verwendet, um die Innenstadt oder den zentralen Wirtschaftsbereich einer Stadt zu bezeichnen“. Soweit klar, wusste man, aber wisst Ihr auch, wo die Downtown in Eurer Stadt liegt? Auf X (ehem. Twitter) [2] habe ich jetzt eine Webanwendung gefunden, ich welcher der Nutzer sein Gefühl oder Wissen über die Downtown eintragen kann. Über alle Eintragungen wird dann live der Durchschnitt berechnet und als Hexagon-Karte angezeigt.
Screenshot 1: Meine Erfassung und das Ergebnis, die Downton in Halle (Saale)
Ich habe es natürlich für Halle (Saale) probiert, hier die Ergebnisse. Übrigens Hallenser, in Halle gibt es noch recht wenige Einträge, momentan nur sechs. Ihr solltet Euer Wissen oder Gefühl über Halle-Downtown einbringen. Also los, „Where is Downtown?“ [3].
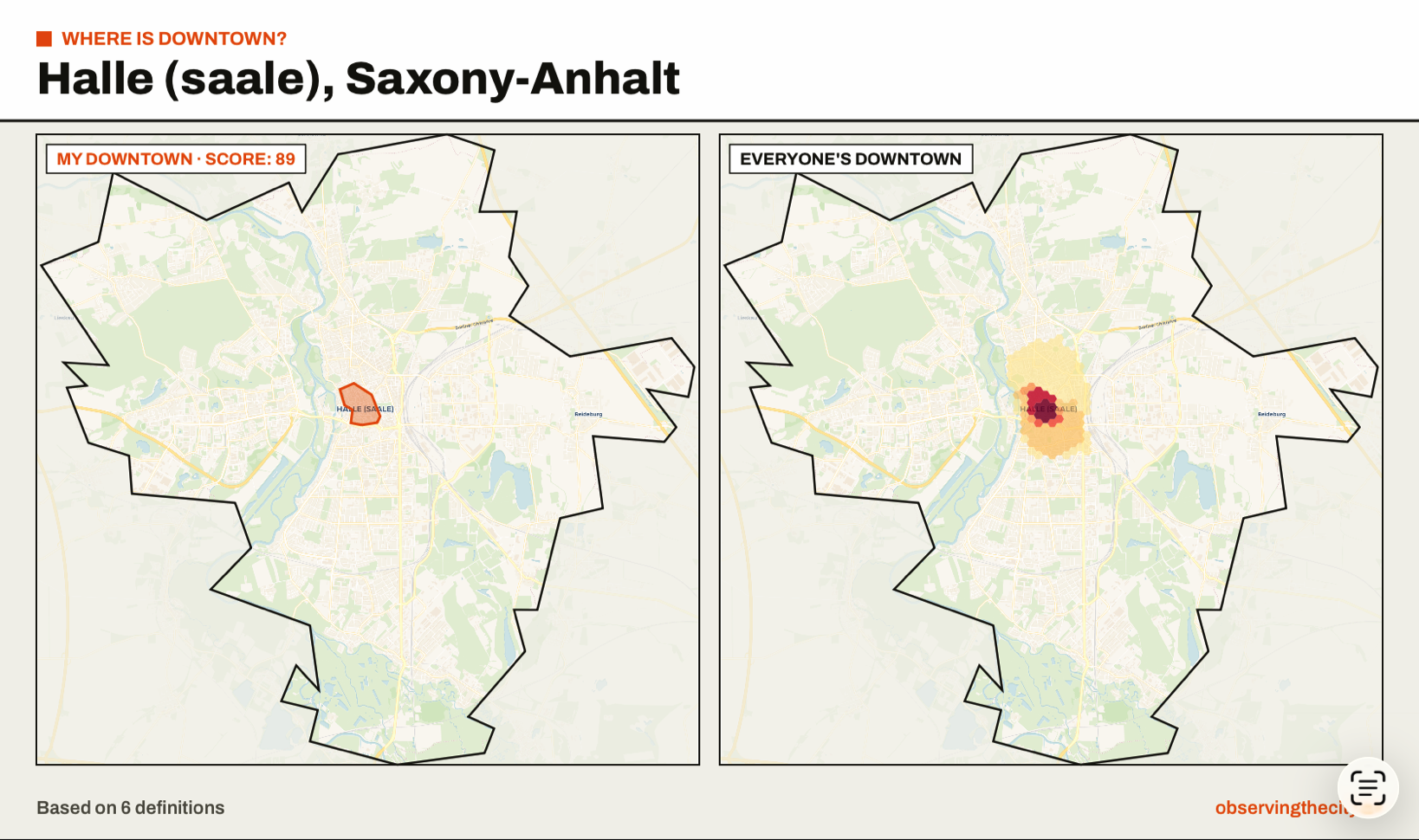
Screenshot 2: Meine Erfassung und das Ergebnis, die Downton in Halle (Saale) über das gesamte Stadtgebiet
This guy built a website allowing users to define what they see as "Downtown" in their city. The map here shows New York City but there is more in the source: https://t.co/T3Kf9GMvVypic.twitter.com/WQaKgQkEIy
— Simon Kuestenmacher (@simongerman600) July 15, 2026
Screenshot: Selbstversuch – Der #geoObserver als Satellitenbildermosaik
Im April hatte ich hier in „Cool: Dein Name aus Satellitenbildern“ [1] darüber berichtet, wie man aus realen Satellitenbildern Schriftzüge erstellen kann. Nun habe ich in der Wochennotiz 834 [2] einen Beitrag mit einer Anwendung gefunden, die auch reale Satellitenbildern, diesmal von „Sentinel 2“ verwendet. Hier werden die Satellitenbilder genutzt, um hochgeladene Bilder in einer Browser-App als Mosaik einzufärben. Navigiert Ihr durch das Ergebnis, zeigt die App auf jedem Mosaik-Teilchen die reale Szene in der Welt inkl. den Koordinaten. In jedem Fall interessant und unterhaltsam. Ihr findet alle Details unter „Sentinel-2 Paint: Recreate Any Image from Real Satellite Imagery“ [3] und könnt die App unter Sentinel-2 Paint [4] starten. Ich habe es mal im Selbstversuch ausprobiert und es funktioniert perfekt 🙂
Animation: Jedes #geoObserver-Mosaikteilchen ist ein reales Satellitenbild